deForm: An Interactive Malleable Surface for Capturing 2.5D Arbitrary Objects, Tools, and Touch
UIST, 2011
Abstract
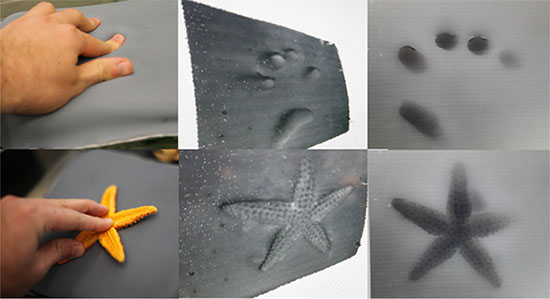
We introduce a novel input device, deForm, that supports 2.5D touch gestures, tangible tools, and arbitrary objects through real-time structured light scanning of a malleable surface of interaction. deForm captures high-resolution surface deformations and 2D grey-scale textures of a gel surface through a three-phase structured light 3D scanner. This technique can be combined with IR projection to allow for invisible capture, providing the opportunity for colocated visual feedback on the deformable surface. We describe methods for tracking fingers, whole hand gestures, and arbitrary tangible tools. We outline a method for physically encoding fiducial marker information in the height map of tangible tools. In addition, we describe a novel method for distinguishing between human touch and tangible tools, through capacitive sensing on top of the input surface. Finally we motivate our device through a number of sample applications.
Download
Cite
BibtexThis work was supported in part by the NSF under Grant No. 0739255, NIH contract 1-R01-EY019292-01, and by a grant from the NTT-MIT Research Collaboration. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.